
📄 内容摘要:本文深入讲解FANUC机器人运动指令中位置数据与速度倍率的设置方法。位置数据部分详细介绍了如何通过光标选择点位编号进行注释编写、直接修改编号,以及如何将P点修改为位置寄存器,并解释了橘黄色编号表示位置资料未被示教记录的含义。速度倍率部分则系统阐述了J、L/A/C/S等不同运动类型下的速度形式差异,包括倍率与数值设置的区别,以及系统变量$PARAM_GROUP[group].$SPEEDLIM的作用。文章还通过实际验证案例,分析了指令速度与整体倍率对机器人运动轨迹的影响,明确指出更改语句中的速度会影响轨迹,而更改整体倍率则不会,为轨迹调试提供了重要参考。
💡 建议:如果您想系统学习FANUC数控系统的操作与编程,强烈推荐《广数发那科数控车床操作与编程精讲录播版》。该课程从基础到进阶,全面覆盖FANUC数控车床的编程指令、操作技巧及实战应用,与本文讲解的运动指令知识高度契合,能帮助您巩固理论并提升实操能力。
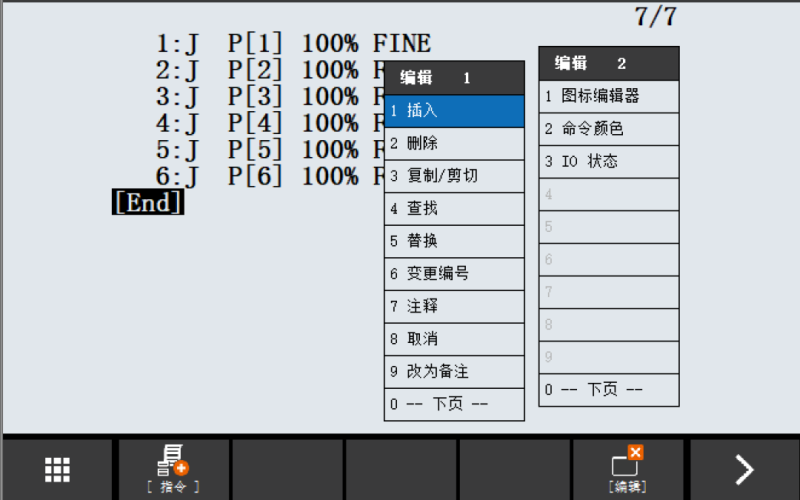
二:位置资料
光标选择至点位编号
![图片[1]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103111852-b9b98992-e5ce-4ebf-bb4c-df5b0b8bf9db.png)
按下enter键,可进行注释编写。
![图片[2]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103112585-690a521a-14ba-4cac-9bfd-150a38137d21.png)
直接输入编号,可更改点位编号。若此程序中没有所设置的新编号点位,更改编号后,会保留原点位及其注释。
![图片[3]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103113736-fd21030e-0885-4d0d-8e33-4602fb2e3ff4.png)
菜单栏,选择“位置”可显示点位资料。点位资料可手动直接修改。
点位资料项具体内容,可回顾下方文章。
FANUC-点位配置项
![图片[4]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103114374-b72a9aed-8e26-4f81-b303-4051522203db.png)
菜单栏,选择“选择”,可将P点,修改为位置寄存器。编号橘黄色,表示位置资料未被示教记录。
![图片[5]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103115628-744f7a2c-62ce-4b79-8ba5-a47a770855bd.png)
![图片[6]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103116359-420bebe2-036c-4509-9352-56c387c4c5a9.png)
位置寄存器的注释需要在位置寄存器页面(data,类型-位置寄存器)编写。
![图片[7]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103117269-6bf89d54-a85f-475c-820e-0d508a089ecf.png)
三:速度/倍率
若运动类型为J,速度形式为倍率,最高100%。
若运动类型为L/A/C/S,速度形式为数值,最大值系统一般已根据机型限定,对应变量:$PARAM_GROUP[group].$SPEEDLIM。
此变量虽然可以更改,但是,系统内部已经根据机型限定,改大后(重启生效),虽然程序中速度值可相应改大,但是不会发生实际加速效果。
在自动状态下或T2模式下,机器人的运动实际速度:语句速度*倍率(示教器右上角)。若在T1模式,上述的计算速度高于250mm/s时,速度会被降速至250mm/s。
![图片[8]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103119839-02784935-63f6-43af-8748-463e6a1a3428.png)
对于L/A/C/S运动类型,速度还可以更改为时间单位,意味着要求机器人机器人按照设定的时间运动到指定点。此方式也是节拍优化的一个思路,但是时间设定小值时,如果机器人运动已经到极限,也不会按照设定的小值时间运动。
![图片[9]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103120300-2eee69fb-617f-4b59-814c-6f332b284e3f.png)
关于速度和倍率对轨迹影响验证如下:
对P[2]/P[3]/P[4]指令速度800,总速率100%运行轨迹及程序。
对P[2]/P[3]/P[4]指令速度4000,总速率100%运行轨迹及程序。
对P[2]/P[3]/P[4]指令速度4000,总速率20%运行轨迹及程序。
即:1与2,总速率相同,指令速度不同。2与3,指令速度相同,总速率不同。
![图片[10]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103122163-abfc044c-815b-4e73-9eae-71101d02f147.png)
结论:
更改语句中的速度会对轨迹产生影响,更改机器人整体倍率(示教器右上角)不会对轨迹生产影响。
故而,我们在进行轨迹调试验证时,应保持T2模式验证,可先以低倍率运行验证,确认没问题后,再增加倍率。此验证过程中,不应改变轨迹语句中速度。如发生更改,应重复上述验证流程。
四:定位类型
1.FINE
机器人精准到达示教点位后,并停顿。(停顿时间无法定义)。
所以,对于作业点(如取料、放料、拍照等)应使用FINE。
![图片[11]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103124426-bed11a58-6fc4-47d9-ad91-0341efe57764.png)
2.CNT
机器人以靠近的方式快速划过目标点。
CNT后面的值0~100,数值越大,离目标点越远,停顿越不明显。一般值小于80就会出现停顿,值越小,停顿越明显。CNT0效果等同于FINE。
所以,轨迹中过渡点应尽可能使用CNT,且其值尽可能接近100,以保证节拍。
在单步模式执行CNT轨迹时,机器人仍然会精准到达示教点。
![图片[12]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103124313-69b4b972-c967-4cf8-ae29-4303cb20d395.png)
3.CR
此定位类型非标配,需安装拐角轨迹指定功能(R806)。功能安装联系发那科官方。
用于指定目标点的距离。J指令无法使用。
![图片[13]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103125931-28daa482-8a0a-4a6d-983d-b55d1fb11ba1.png)
![图片[14]-FANUC机器人编程指令详解:运动指令(二)-位置数据与速度倍率设置技巧-机械资源网](https://www.u557.com/wp-content/uploads/2026/01/20260127103126420-1c15614a-c19c-48eb-9913-b78fb7409dc9.png)













暂无评论内容