

 aiju33
aiju33
UG NX 1980 加工工艺实例课:99、第99节课_钛合金叶轮工艺规程首页讲解
咱们今天聊聊一个硬骨头——钛合金叶轮的加工。这玩意儿可不是随便拿个三轴机床就能搞定的,它集复杂曲面、高精度、难加工材料于一身,是咱们机械加工领域里典型的“明星产品”。我这些年摸爬滚...
UG NX 1980 加工工艺实例课:98、第98节课_铸件四轴工艺流程填写
小李啊,咱们干这行,不是光会按按钮就行了,得懂里头的门道。今天咱们说的这个件儿,别看它不大,可里头学问不少。从图纸上就能看出来,这曲面复杂,公差要求高,材料也不是省油的灯。咱们得把...
UG NX 1980 加工工艺实例课:97、第97节课_铸件回转零件工艺流程填写
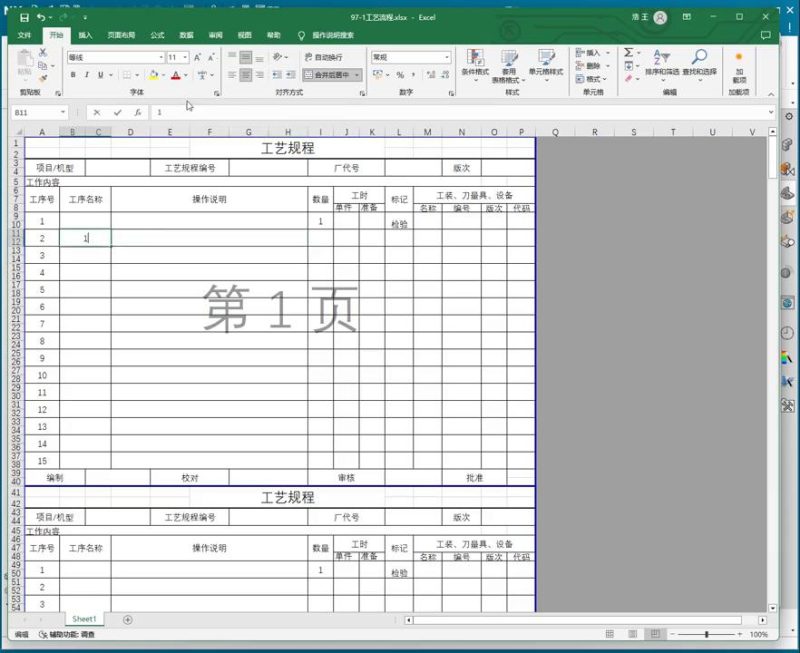
今儿个,咱们聊聊一个典型的活计——高精度航空级连接器基座的加工工艺。这活儿,看着不大,里头可全是学问。从毛坯进场到成品出厂,每一步都得想透彻,容不得半点马虎。咱们做这行的,不仅要会...
UG NX 1980 加工工艺实例课:96、第96节课_五轴正反面零件连接讲解
今天咱们要聊的这个活儿,可不是什么光板件、常规件,而是一个实打实考验真功夫的复杂曲面连接体。这玩意儿,无论是从材料选型、三维建模、刀路规划,还是到最终的装夹与实际切削,处处都透着精...
UG NX 1980 加工工艺实例课:95、第95节课_五轴正反面零件工艺讲解
这活儿啊,咱们今天要聊的,是个不折不扣的硬骨头——一个长条形的复杂连接件。它不仅尺寸长,有五百多毫米,而且型面复杂,特别是那些倒扣面和自由曲面,对精度和表面质量要求那是相当高。材料...

UG-FBM自动编程视频教学 NX特征自动编程教程20课
UG - FBM 自动编程自学视频教程,专注 NX 基于特征自动编程!涵盖自动编程概念、特征种类、刀具库等内容,教你自动识别加工区域、选刀具,支持多样操作,视频不加密,下单发百度网盘链接,助你...
UG NX 1980 加工工艺实例课:94、第94节课_五轴多工序时效后加工方法
这活计,咱们得一步一个脚印来,尤其碰上这种复杂曲面件,UG建模和编程是咱们的利器,但最终落到实处,还得靠扎实的工艺和现场经验。这次咱们要干的,就是个典型,从毛坯到成品,每一刀、每一面...
UG NX 1980 加工工艺实例课:93、第93节课_五轴多工序异形零件工艺方法
这块铝合金的活儿,看着不大,但里头门道不少。从毛坯下料开始,就得心里有数,这件主要得在五轴机床上转腾。尤其是那些个“倒扣面”和边边角角,普通三轴是肯定吃不动的。UG里头咱们就得把刀路...
UG NX 1980 加工工艺实例课:92、第92节课_铸件类毛坯创建方法讲解
这活儿啊,别看只是个毛坯定义,里头的门道可不少。尤其咱们搞机械加工的,第一步把毛坯搞清楚,那就等于是给后面所有的工序打地基。一个合格的毛坯模型,不光要能体现出你零件的最终形状,更重...
UG NX 1980 加工工艺实例课:91、第91节课_高零件避让连接工艺4讲解
小伙子们,今天咱们不聊虚的,直接掰扯掰扯手头这个活儿。这回要加工的是个航空级的复杂叶轮,材料是TC4钛合金,要求那叫一个高,表面光洁度、形位公差都是硬指标。别看这玩意儿小巧,里面的门...
