

 aiju33
aiju33

FANUC弧焊系统功能全解析:检测、再继续、刮擦起弧等核心设置详解
本文深入解析FANUC弧焊系统中的关键功能设置,涵盖检测功能、原始焊道再继续功能、刮擦起弧功能、再起弧功能、焊接速度指令及其他功能。详细介绍了电弧耗尽检测、气体耗尽检测、焊丝耗尽检测、...
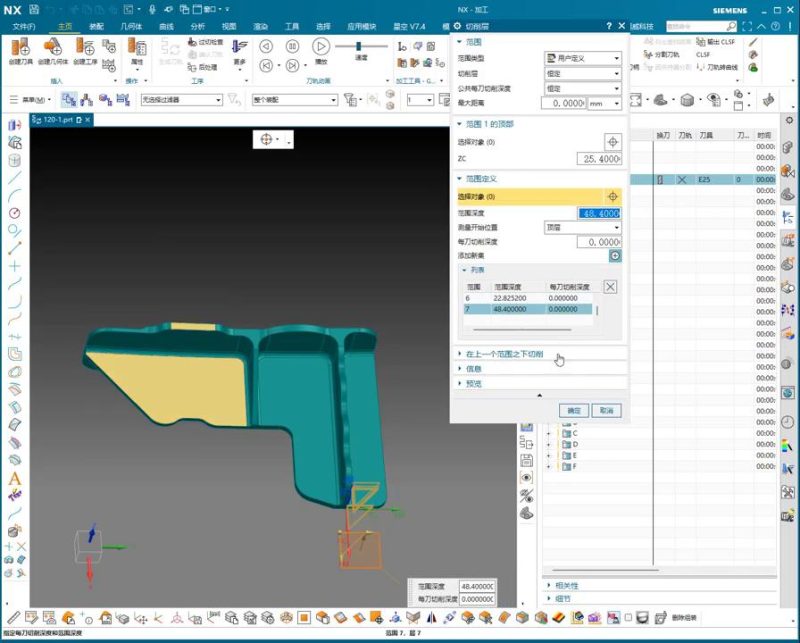
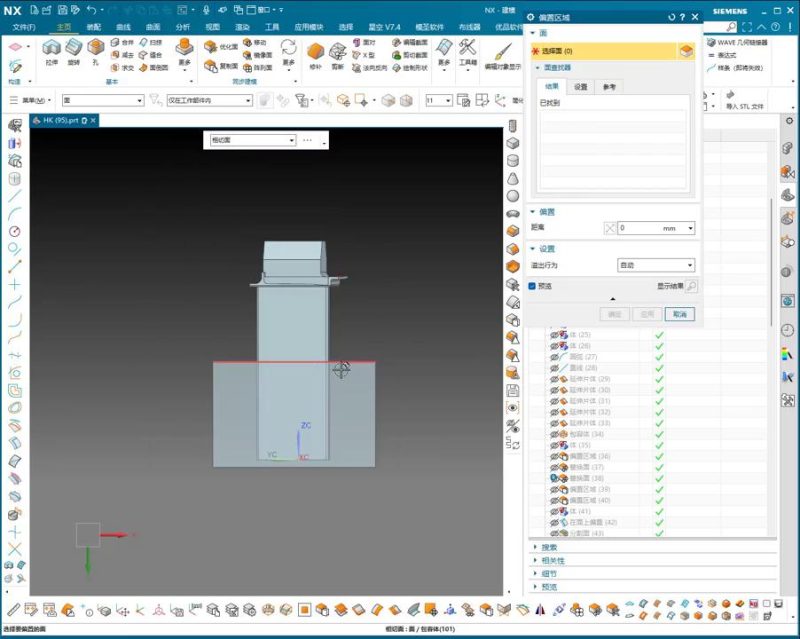
UG NX 1980 加工工艺实例课:14、第十四节课_案例、零部件连接筋工艺方式讲解
本节课程以 UG NX 1980 为平台,详细演示了复杂零部件的加工工艺规划,重点聚焦于如何创建和应用辅助连接筋(连接体)。通过斜率分析识别了零件中的曲面和平面区域,确定了 $\Phi$12 和 $\Phi$1...
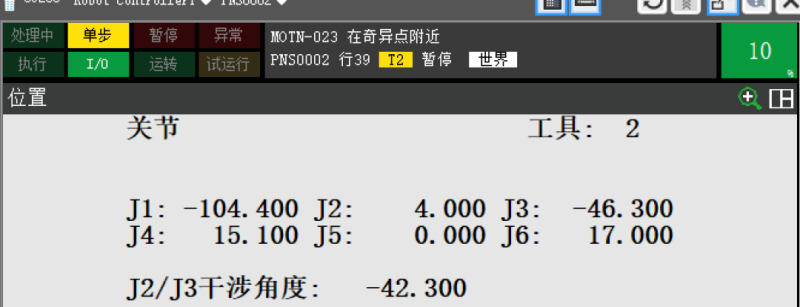
FANUC机器人奇异点回避功能详解:解决轨迹异常与报警问题
本文深入解析FANUC机器人奇异点的概念、影响及解决方案。当J5轴在-3.4°~3.4°范围时,机器人进入奇异点状态,手动操作会触发MOTN-023报警,轨迹运行则可能因MOTN-063错误而中断。文章通过实际...
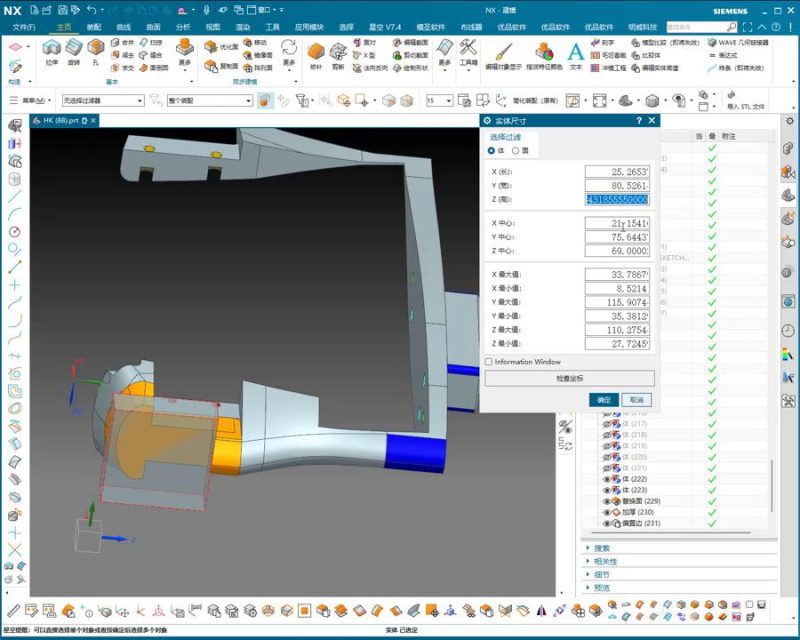
UG NX 1980 加工工艺实例课:13、第十三节课_零部件不同工艺连接创建讲解
本节课程深入剖析了在 UG NX 1980 环境中,如何为非标准(异形)零件创建复杂的工艺连接结构,以确保在多面加工过程中实现稳固、精确的夹持与定位。由于原始零件的上下表面为异形结构,传统夹具...

FANUC机器人通识指南:本体分类、控制柜型号与电源接线详解
本文全面解析FANUC机器人基础知识,涵盖机器人本体分类、控制柜型号及电源接线要点。机器人本体包括四轴SCARA、蜘蛛手、六轴机器人、协作机器人等,应用由末端工具定义。控制柜分为A柜、B柜、ma...
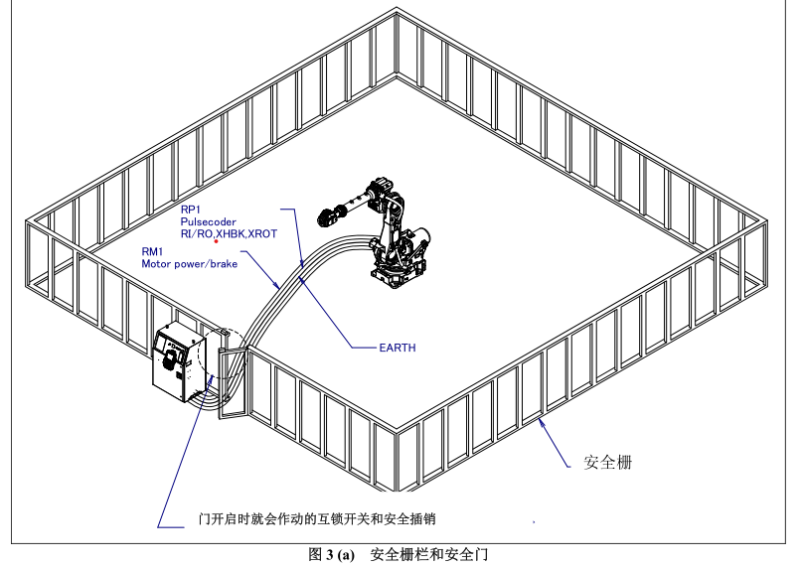
FANUC机器人线缆连接与电池维护全解析:RCC接口、EE信号及选购指南
本文深入讲解FANUC机器人线缆连接与电池维护的关键知识。详细介绍了机器人标配线缆,包括RM(动力线)、RP(编码线)、TP线(示教器线)及地线,统称为RCC线。根据不同机型(如四轴、协作机器人...
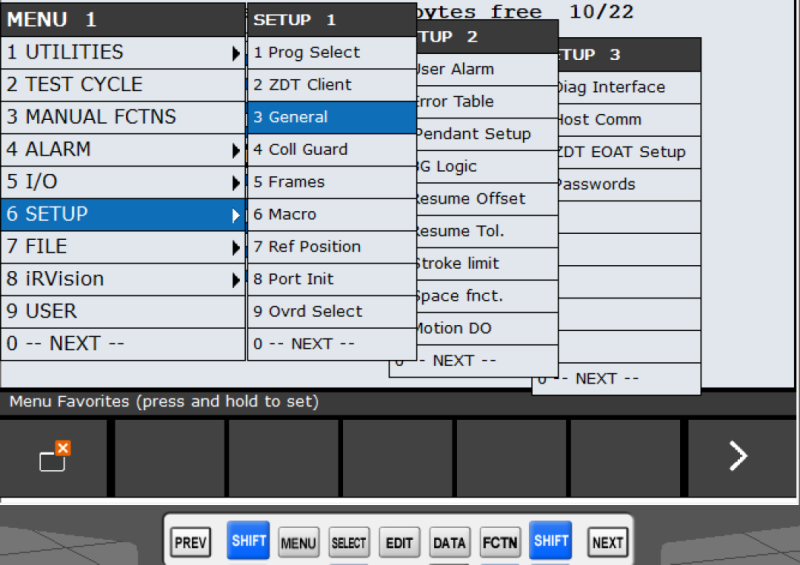
FANUC机器人操作指南:语言切换、功能选项查看与零点校准详解
本文详细介绍了FANUC机器人的三项核心操作:首先,通过Menu-SETUP-General菜单切换语言,若缺少中文选项需联系官方安装语言包,注意基础词典与加装语言不可重复;其次,在Menu-状态-版本ID页面...

FANUC机器人通识教程:查漏补缺全面掌握工业机器人基础知识
本系列教程《FANUC机器人通识》分为三部分,系统讲解FANUC工业机器人的核心知识。第一部分介绍机器人基本结构与工作原理,第二部分深入操作界面与编程基础,第三部分则聚焦故障排查与维护技巧。...
UG NX 1980 加工工艺实例课:12、第十二节课_仿形钳口创建叶片讲解
本节课程深度讲解了在UG NX环境中为复杂零件设计和制作仿形软钳口(Soft Jaws)的完整工艺流程。核心在于利用布尔减法操作,将工件的精确轮廓反向刻录到毛坯夹具中,从而实现高精度且稳定的夹持...

FANUC寄存器数量设置与扩展方法详解:从默认值到R830功能拓展
本文详细介绍了FANUC系统中寄存器数量的设置与扩展方法。默认情况下,位置寄存器为100个,数值寄存器为200个。当数量不足时,可通过控制启动模式进入程序设置菜单,修改Numeric Registers和Posi...
