
内容摘要:本文详细介绍了FANUC机器人针对两台机器人相近作业区的防撞逻辑设置方法,包括防干涉区和IIC功能的应用与限制,并提出了基于坐标监控的实用解决方案。
💡 进阶建议:在设置FANUC机器人防撞逻辑时,深入理解机器人编程和操作是基础。如果您想系统掌握FANUC机器人的核心功能,包括变量使用和坐标监控等关键知识点,那么《发那科FANUC零基础学习加工中心操作及编程》这门课程将为您提供全面的指导,帮助您从零开始构建扎实的机器人编程能力,从而更有效地实施防撞策略。
一:功能需求描述
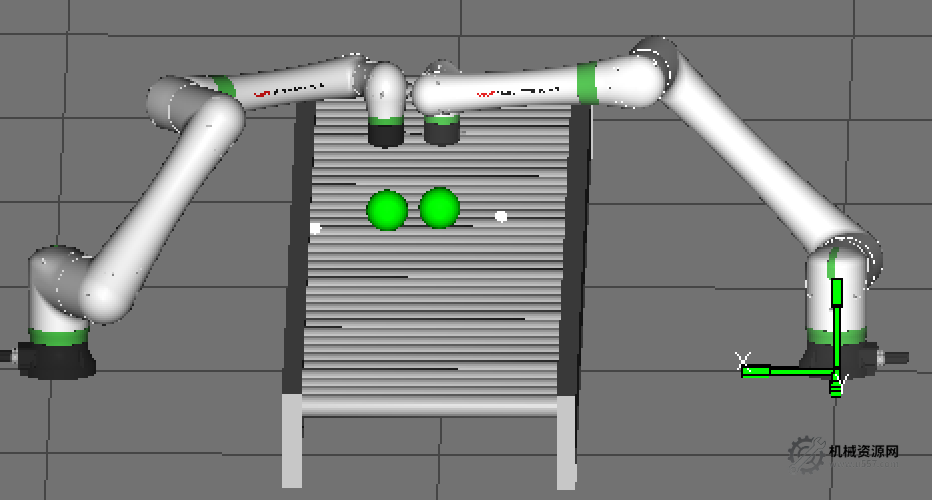
客户现场产线两侧各一台机器人,两台机器人对产线上的产品进行装配作业。两台机器人的作业区并不重叠,但是两台机器人作业时,彼此较近。机器人作业区域,也不是固定的,会随着产品位置变化(由机器人手持相机引导)。机器人作业时,姿态基本固定,没有过多繁杂动作。
虽然,逻辑上,因两台机器人彼此的作业区域并不重叠,不应发生实际碰撞,但是由于彼此相距较近,仍有碰撞风险。我们需要设置相应防撞逻辑。
二:功能设计思路
发那科机器人对于设备的共同作业区域防碰撞,可以设置防干涉区,即设置空间固定区域为共同作业风险碰撞区域。通过信号设置及交互,保证两台机器人轮流作业,避免碰撞。可见,防干涉区用于固定区域设置,并且两台机器人存在共同作业区域。所以,用于本案例并不合适。
再者,发那科机器人对于设备动态过程防撞,还有IIC功能。两台机器人彼此建立通讯,通过点位设置,让两台机器人了解彼此位置,因而可动态防撞。不过,本功能为选项功能,且设置过程较为复杂。
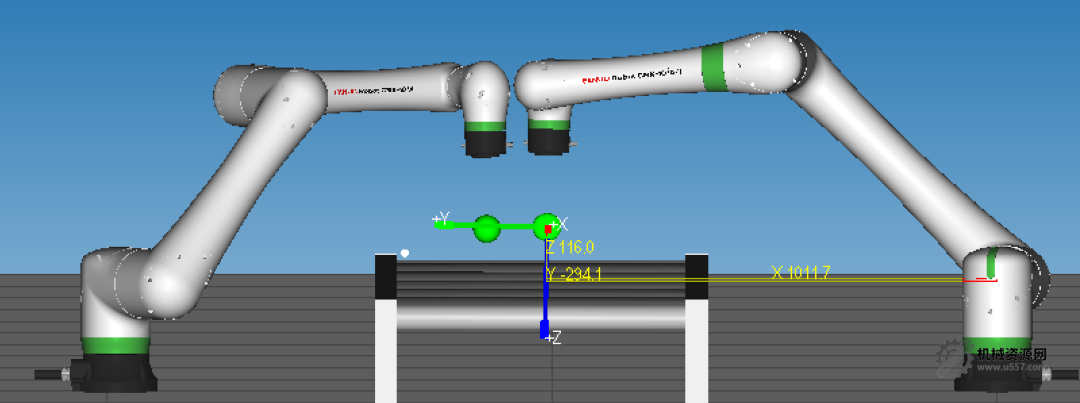
两台机器人面对安装,所以两台机器人间距离固定,且作业时,姿态固定,可近似认为与X轴平行,我们可以监控两台机器人X轴坐标值之和与空间安装固定距离关系以防碰撞(即两台机器人X轴坐标之和如果大于了安装距离,即可能发生碰撞)。
三:功能实现相关知识点
1.机器人位置变量
变量使用回顾文章
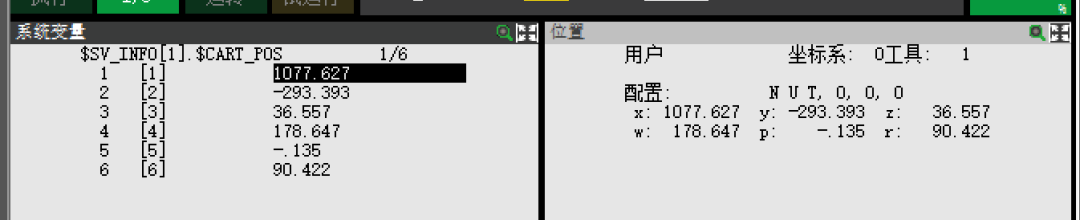
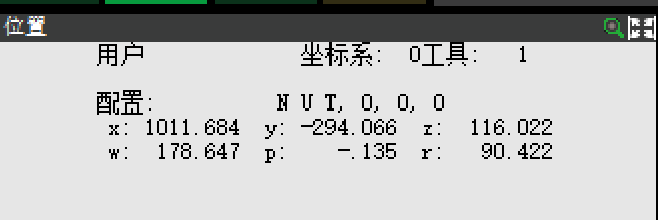
变量$SV_INFO[1].$CART_POS可表示机器人当前位置信息。
2.组信号
位置数据通过组信号交互。
信号分配回顾文章
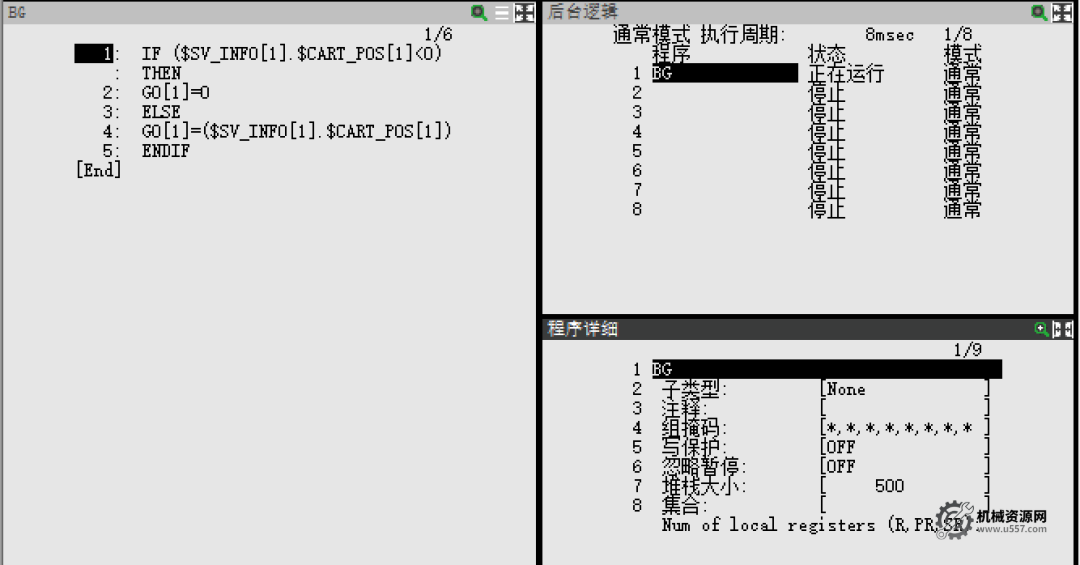
3.后台逻辑(menu-设置-后台逻辑)
后台逻辑是后台持续循环运行指定程序的功能。我们可以利用此功能,将位置数据实时赋值至组信号,以实时传输
四:功能设计步骤
1.将两台机器人手动移至靠近状态,查看两台机器人当前位置的X值,将两值相加获得报警阈值。本案例中,两台机器人实际作业过程时X值和为1850,靠近状态为1890。取阈值1870。
2.分配组信号
本案例使用MODBUS TCP通讯,需要16位的组信号。(发那科组信号最多16位)。两台机器人都需要如此操作。

3.编写程序
编写如下程序,并加入后台逻辑,将机器人X轴值实时通过组信号传输给PLC。两台机器人都需要如此操作。
由于机器人传输的负数,PLC收到的为补码形式,而实际机器人X值为负值时,根本没有碰撞风险,因而程序中,对于负值时,只传输0.
4.让PLC实时将两者接收的值求和,并与报警阈值1870对比,如果大于1870,立刻将机器人停止(比如将UI[1]/UI[2]/UI[3]/UI[8]信号之一或全部置为OFF)












暂无评论内容