

UG多轴宏坐标旋转后处理:实战痛点与解决方案
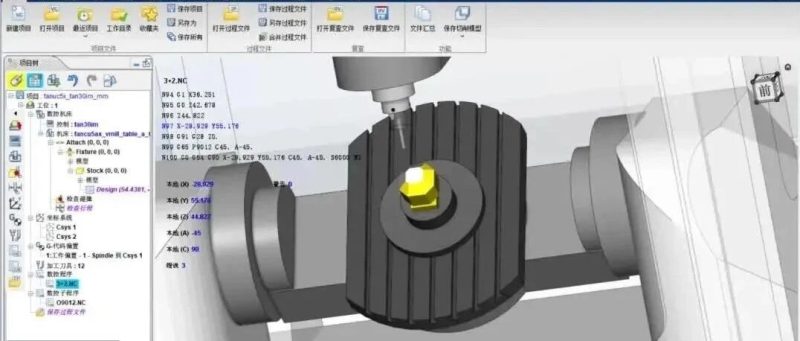
在多轴加工,特别是涉及复杂曲面或深腔零件时,UG多轴宏坐标旋转后处理是避免不了的核心环节。这玩意儿搞不好,轻则刀具路径不顺,加工表面质量差;重则直接机床撞刀,废件事小,更怕伤及设备和人员。我当初摸索这块,最头疼的就是后处理文件里坐标系的逻辑,特别是工件坐标系(WCS)如何随旋转轴动态更新,一旦跟机床实际运动不匹配,空运行都心惊胆战。
后处理文件配置:坑在哪里?
UG多轴后处理的灵魂就在于.tcl和.def文件。咱们编程工程师,通常关注的是刀路、避让、切削参数,但真正把程序“喂”给机床的,是后处理。宏坐标旋转的核心挑战在于如何准确地将UG软件内部的刀具向量、工件旋转角度,转化为机床控制器能识别的A、B、C轴联动指令。
- 坐标系定义不匹配: UG里建立的机械坐标系(MCS)与实际机床的运动学模型不对版,这是万恶之源。特别是摆头/转台类型,是A轴还是C轴先转,是工作台转还是主轴转,这些细节若在后处理中定义错误,出来的G代码会完全偏离预期。我建议,拿到一个新机型或新项目,首先得把机床的运动学图搞清楚,对照后处理文件,确保每个旋转轴的零点、正反方向以及旋转中心都准确无误。
- 宏调用参数失误: 许多多轴后处理会通过宏指令来处理复杂的坐标旋转。例如,一个简单的G68或G51指令,其内部的旋转中心、旋转角度可能需要通过变量从UG传入。如果这些变量在后处理中被错误解析或计算,会导致刀具方向错误,切削点偏移。例如,
PB_CMD_set_csys这个后处理指令,就可能涉及WCS的动态更新,一旦内部计算逻辑有偏差,就会出现加工位置错乱。 - 刀具长度补偿(TLC)的动态调整: 多轴加工时,特别是摆头式机床,刀具长度补偿不再是简单的Z向补偿。当主轴摆动时,刀具相对工件的有效长度会发生变化。如果后处理没有正确地根据旋转角度重新计算刀具补偿值(G43.4或G43.5),很可能出现过切或欠切。这是个常被忽略的“隐形杀手”,我发现很多新手都栽在这上面。
本文技术要点源自:《UG多轴宏坐标旋转后处理,包含后处理文件、》原文完整版,建议收藏研究。
实战调试与防撞策略
出了问题,别慌,大部分时候都能救回来。咱们编程工程师,除了会写程序,更得会“救火”。UG多轴宏坐标旋转后处理,包含后处理文件、 里的细节,就是为了减少这种“救火”的频率。
- 模拟验证优先: 任何多轴程序上机前,必须经过严格的UG内部仿真和外部验证软件(如VERICUT)的全面模拟。重点看刀具路径是否干涉、有没有过切、刀轴矢量是否平滑。这步模拟能抓出90%的潜在问题。
- G代码逐段分析: 对于初次上机的复杂多轴程序,不要怕麻烦,对照图纸和UG的刀路轨迹,逐段分析G代码。特别关注G92、G68、G51等坐标变换指令后的实际运动,以及A、B、C轴的瞬时角度和速度。如果发现轴运动指令不符合预期,比如A轴在不该动的时候动了,或者角度跳变过大,那肯定是后处理出了问题。
- 空运行与低速试切: 在确保G代码无误后,上机操作时,务必先进行空运行。将机床行程设置到最小,观察所有轴的运动是否平稳、连贯,有无异常抖动或速度不协调。尤其是在进行坐标旋转时,密切关注主轴与工件、夹具的距离。确认空运行无误后,再进行低速、小吃刀量的试切。
- 声音与振动判断: 咱们老工人,机床的声音和振动就是最好的“警报器”。如果刀具在加工过程中发出异常尖锐的嘶吼,或机床出现不正常的振动,立即停机检查。这往往是吃刀量过大、刀具磨损,或者是刀路公差设置过大导致机床“跳刀”的前兆。后处理里如果设置了不合理的进给速度或切深,也会导致这些问题。
很多时候,咱们需要自己动手调整后处理文件,特别是在一些非标或老旧设备上。这就要求我们不仅懂UG,还得懂控制器指令集和后处理语言。CNC自学网提供了丰富的后处理修改教程,多学习,多动手,才能真正做到心中有数。
💡 学习者 FAQ 解答
Q1: 多轴机床A轴或B轴行程超限(报警号AL-1510)时,该如何紧急处理和调整后处理?
A1: 遇到AL-1510超程报警,首先立即按急停。这通常是UG刀路计算时未考虑机床实际行程,或后处理输出的轴角度超出了机床的物理极限。紧急处理是,在机床控制面板手动将轴移动到安全区域。后续修改后处理,需要调整`pb_check_axis_limits`这类函数,在后处理阶段就对轴角度进行限制或优化,确保输出的G代码在机床允许的行程范围内。如果刀路本身受限,可能需要重新调整UG内的摆头角度限制或刀具路径策略。
Q2: 不同品牌数控系统(如FANUC与Siemens)对UG宏坐标旋转的G代码解析有何差异?出现SV-002伺服报警时如何排查?
A2: FANUC和Siemens对宏程序的调用和坐标旋转指令确实有差异。FANUC常用G68、G68.2进行坐标旋转,可能还需要手动调用O9000系列宏程序;Siemens则多用TRANS、ROT、CYCLE800等高级指令。如果UG后处理输出的指令不符合当前系统规范,就容易出问题。SV-002伺服报警通常是伺服电机过载、编码器故障,或G代码指令让轴在短时间内进行剧烈、不合理的加减速。排查时,先检查G代码中对应报警点的轴进给率和加速度是否异常,特别是旋转轴在启动或停止时的指令。如果后处理输出的进给和加速度过高,需调整后处理中的`mom_speed`和`mom_accel`相关参数,或者在UG里降低切削参数。听听伺服电机是否有异响,用手盘动轴检查阻力。
Q3: UG多轴宏坐标旋转后处理中,如何有效避免刀具与夹具干涉?尤其是在复杂加工区域。
A3: 避免刀具与夹具干涉,这在多轴加工里是头等大事。首先在UG编程阶段,利用软件的干涉检查功能,反复验证刀具路径。其次,后处理输出G代码后,在虚拟仿真软件(如VERICUT)中进行二次校验,这是最有效的防撞手段。再者,在后处理文件中,可以加入一些自定义逻辑,比如在特定旋转角度或靠近夹具区域时,强制增加安全距离或降低进给。我建议,对于复杂区域,手动优化部分G代码也是常用手段,尤其是通过空运行观察,发现潜在风险后,手动插入G04暂停指令,甚至微调轴位置,确保万无一失。永远记住,安全比效率更重要。













暂无评论内容