
Mastercam2026三轴编程:从建模到加工的隐患排查
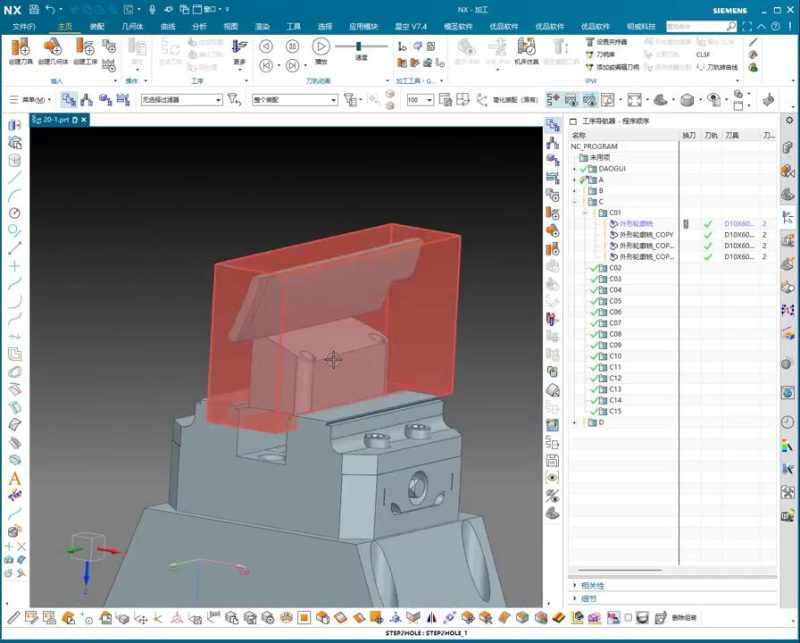
在加工中心使用Mastercam2026进行三轴编程,最让咱们头疼的不是G代码生成,而是刀路模拟与实机运行不符导致的“撞机”事故。不少人急功近利,在建模或刀路参数设置上敷衍了事,结果导致空刀多、吃刀量过大,甚至出现可怕的干涉,这都是车间里的安全隐患。
![图片[1]-Mastercam2026三轴编程:加工中心实战防撞与刀路优化避坑指南](https://www.u557.com/wp-content/uploads/2025/09/20250928185002707-09fa9a354a663c3889ae7cfcf8d4ce49591983336-1-800x800.jpg)
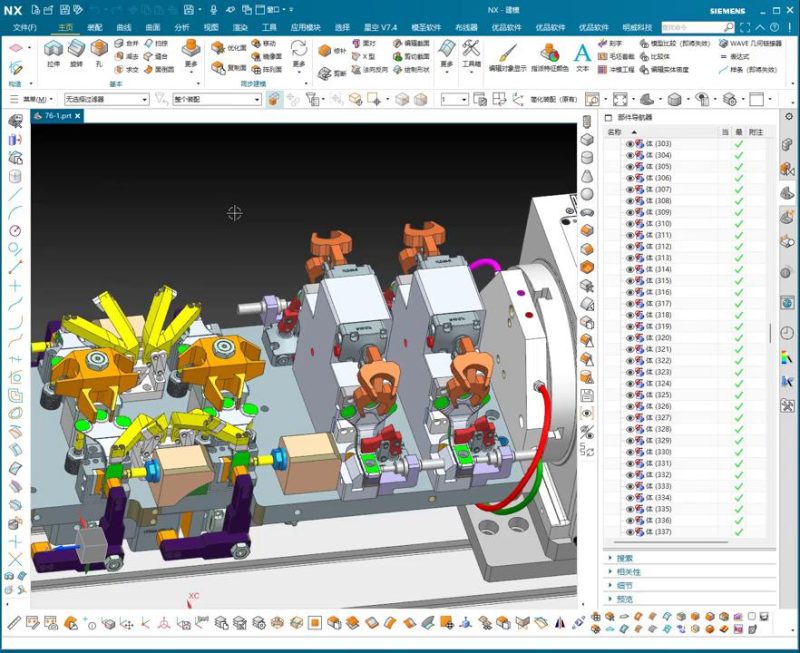
建模精度:隐患之源
几何模型是所有刀路的基础,它的精度直接决定了后续加工的成败。在Mastercam里绘图建模,别以为模型“看起来差不多”就行了。曲面光顺性、拔模角度、倒圆R角这些细节,对刀路生成影响极大。一旦模型存在破面、缝隙,或公差设置过大,生成的刀路就可能出现跳刀、过切或欠切,这些都是加工质量和安全的大敌。我建议大家,在建模阶段就要用好Mastercam的曲面分析、曲面偏移等工具,确保模型几何的完美性。宁可在建模上多花半小时,也别在机床上耗费几个小时甚至几天去“擦屁股”。
![图片[2]-Mastercam2026三轴编程:加工中心实战防撞与刀路优化避坑指南](https://www.u557.com/wp-content/uploads/2025/09/20250928185001937-2-796x800.jpg)
刀路生成:细节决定生死
编程的核心就是刀路生成。过切、欠切是常事,关键是怎么提前发现并避开。Mastercam2026的刀路策略非常丰富,但每一种策略都有其适用范围。进给、转速、吃刀量这些参数,必须结合刀具材质、工件材料特性、机床刚性等综合考量。我发现很多新手盲目套用参数,结果就是振刀严重,刀具磨损快,表面光洁度也差。别忘了,Mastercam自带的防撞检测功能必须利用起来,它能帮你预判潜在的干涉。在实际运行前,务必进行空运行验证,这是我们机加工人防撞的最后一道防线。如果你想系统学习Mastercam2026的绘图建模、刀路编程和实战技巧,我建议可以看看Mastercam2026 加工中心 CNC 三轴编程视频课程(绘图建模 + 刀路编程 + 实战例题),里面有不少实用的案例和避坑经验。
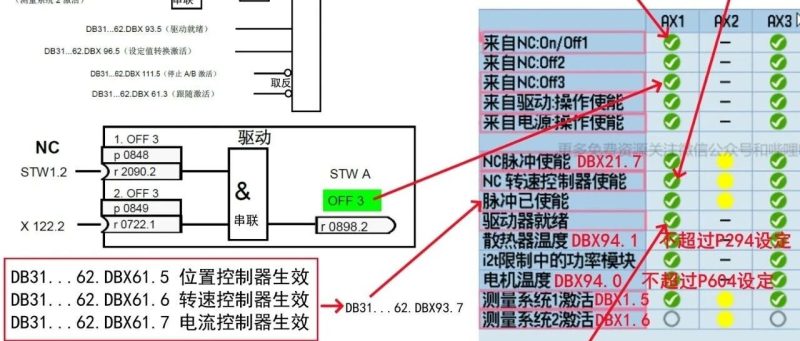
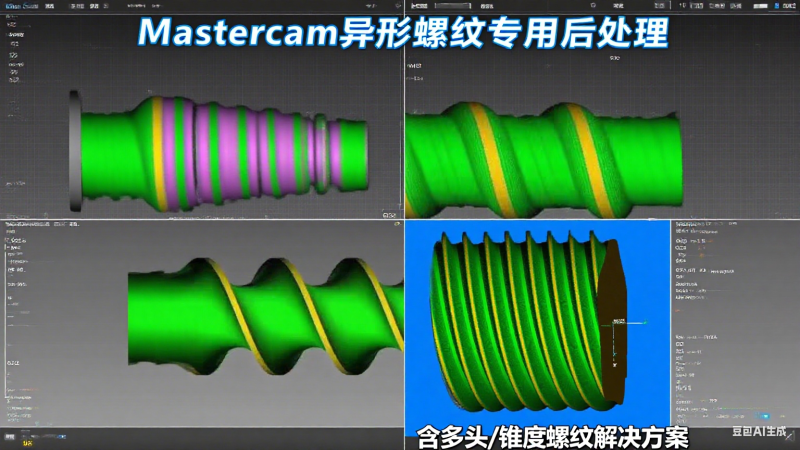
后处理与实机调试:M代码与G代码的陷阱
后处理是连接编程软件和机床的桥梁,如果后处理文件没有配置好,它输出的G代码和M代码就可能成为“数字垃圾”,轻则程序报错,重则直接撞机。不同机床系统(如FANUC、Siemens、Mitsubishi)对M代码、G代码的解读习惯存在差异,特别是宏程序、固定循环的调用格式。我处理过太多因为后处理输出的坐标超限,导致机床报AL-1510轴超程报警的案例;也见过因为M代码格式不正确,导致机床报SV-002伺服报警,甚至主轴不转或刀库不换刀的。这时候,你需要懂点G代码编程,能够手动修改程序,并且知道如何调整后处理。cnc自学网在这方面有很多干货,深入浅出地讲解了后处理的配置与调试,可以多去看看,很多实战经验能帮你避免不必要的麻烦。
总而言之,Mastercam2026的编程工作绝不仅仅是画图生成刀路那么简单,它更像是一场对未来加工过程的精准预演。每一个参数的设置,每一条刀具路径的规划,都关乎着机床、刀具和零件的安危。细心、谨慎、多验证,才能确保加工过程的安全与高效。熟练掌握Mastercam2026的各项功能,并结合丰富的实战经验,是每一位编程工程师的必修课。
💡 学习者 FAQ 解答
Q1: 机床运行Mastercam后处理出的程序时,突然报AL-1510轴超程报警,但实际工件空间足够,这通常是什么问题?
A1: 遇到AL-1510超程报警,首先检查程序起点和终点,确认是否真的超出机床行程。其次,查看Mastercam中设定的工件坐标系原点(WCS)与机床上的G54(或G55等)是否一致。很多时候是后处理参数设置有误,导致程序中的坐标值与机床实际最大行程不匹配。立即停止机床,手动回零,检查程序中的坐标指令,必要时手动修正G代码中的极端坐标值或调整后处理。
Q2: 使用Mastercam生成的刀路,在精加工时机床出现明显振刀,导致表面粗糙度不达标,这该怎么排查?
A2: 振刀是刀具、材料、切削参数不匹配的典型表现。先检查刀具是否磨损、装夹是否牢固,排除机械因素。然后回溯Mastercam中的刀路参数:进给量、主轴转速、吃刀量(尤其是径向和轴向切深)。很多时候是吃刀量设置过大,或者进给过快导致。尝试降低进给速度和吃刀量,同时检查刀路类型是否适合该工序(如螺旋下刀而非直插),并确保刀具路径平滑,避免急停急转。
Q3: Mastercam后处理生成的宏程序(如G65调用),在某些老旧FANUC系统上能用,但在新的三菱系统上却无法识别或报错SV-002伺服报警,这是兼容性问题吗?怎么解决?
A3: 这确实是系统兼容性问题。不同的数控系统对宏程序指令、变量定义和子程序调用的语法有差异。FANUC系统常用G65,但三菱、西门子可能有自己的宏程序指令或格式要求。SV-002伺服报警通常与轴运动指令有关,也可能是宏程序中计算出的无效坐标或运动指令导致的。解决办法是:首先查阅三菱系统的编程手册,了解其宏程序语法规范。其次,修改Mastercam的后处理文件,针对三菱系统输出符合其格式的宏程序代码。如果来不及修改后处理,只能暂时手动编辑G代码,将宏程序部分改写成直线插补或循环指令,确保机床能正确识别并执行。
本文技术要点源自:《Mastercam2026 加工中心 CNC 三轴编程视频课程(绘图建模 + 刀路编程 + 实战例题)》原文完整版,建议收藏研究。
💡 遇到这步卡壳别慌!我当年也是看这套 《CNC视频教程总目录》 才彻底顿悟的,同行们可以直接在这看:
🎁 顺便给兄弟们发个福利,全网难找的 【Mastercam 2026 正式中文版下载与安装:全流程避坑指南】 ,我已经帮大家打包好了,直接拿走不谢:














暂无评论内容